
Ավտոմատ առցանց զննման և փաթաթման մեքենա
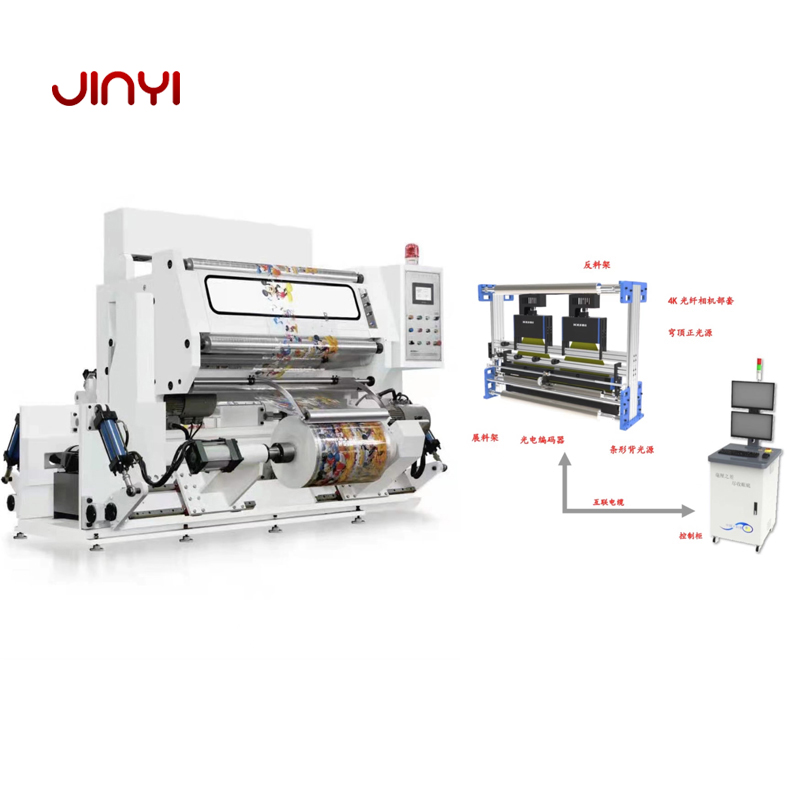



Ավտոմատ առցանց զննման և փաթաթման մեքենա
Առանձնահատկություն
1. Ներմուծված PLC կենտրոնացված կառավարման համար սենսորային էկրանով գործողությամբ:
2. Առանց լիսեռի հանելու և փաթաթելու համար, հիդրավլիկ ամբարձիչ, հարմար նյութ փոխելու համար:
3. Ստուգման համակարգը ընդունում է ամբողջությամբ ավտոմատ պատկերի սկանավորման սարք՝ թերությունը ստուգելու համար
4. Ֆիլմի ներծծող տեսակի նյութի միացնող հարթակ
5. Unwinder-ը հագեցած է EPC համակարգով
6. Համակարգն ունի հաշվիչների հաշվման գործառույթ, գլանափաթեթի տրամագծի հաշվարկ, ֆիլմի կոտրման ժամանակ ավտոմատ կանգառ:


Հիմնական տեխնիկական պարամետրեր
| Մոդել | FHYB-1250 |
| Հարմար նյութ | Պլաստիկ թաղանթ և լամինացված պլաստիկ թաղանթ 12-180 մկ PE, PVC 40-150 միկրոֆոն |
| Վեբ լայնությունը | 400—1250 մմ |
| Մաքս.արձակման տրամագիծը | Ֆ800 մմ |
| Մաքս.փաթաթիչի տրամագիծը | Ֆ800 մմ |
| Մաքս.հումքի լայնությունը | 1250 մմ |
| Առավելագույն մեխանիկական արագություն | 320 մ/րոպ |
| Արագության ստուգում | 30-300 մ/ր |
| Թղթե խողովակի տրամագիծը | 3″ (ներքին տրամագիծ φ76 մմ արտաքին տրամագիծ φ92 մմ) |
| Փաթաթվող շարժիչի հզորությունը | 4 կվտ |
| Ոլորուն շարժիչի հզորությունը | 4 կվտ |
| Քարշիչ շարժիչի հզորությունը | 4 կվտ |
| Ընդհանուր հզորություն | 13 կվտ |
| Քաշը | 3500 կգ |
| Չափ (LxWxH) | 3800x3400x2150 մմ |
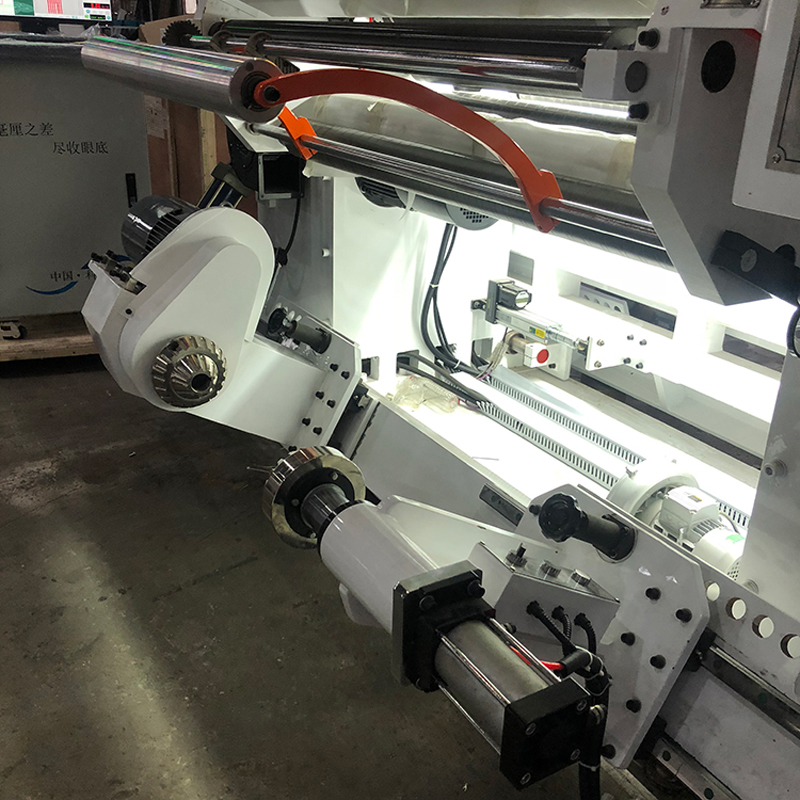
Լիցքաթափվել
մաս Կառուցվածք
● առանց լիսեռի օդաճնշական կոնի վերին արտանետման դարակ, արտանետման դարակը կարող է լինել հիդրավլիկ վերելակ և կարող է լինել լայն և նեղ
●LPC կողային ուղղման մեխանիզմ
●Լարվածության ավտոմատ կառավարում
●Շարժիչը նախաձեռնեք լիցքաթափվել, ոլորման գործառույթով
Տեխնիկական պայմաններ
●Գլանափաթեթի լայնությունը 400 ~ 1250 մմ
●Ապաթափման տրամագիծը (Max) φ800 մմ
●հանգուցալուծման շարժիչի հզորությունը 4կվտ
●LPC կողային ուղղման ճշգրտությունը ± 0,4 մմ
Առանձնահատկություն
● առանց լիսեռի կոնաձև վերևի արձակման դարակ և հիդրավլիկ վերելակ, արագ և հարմար վերև և վար:
●LPC-ով կոկիկ ետ ոլորումն ապահովելու համար
●Լարվածություն Վեկտորային լարվածությունը ավտոմատ կերպով հաշվարկվում է PLC-ի կողմից՝ ավտոմատ լարվածության վերահսկման հասնելու համար՝ ֆիլմի լարվածության կառավարումը դարձնելով ավելի գիտական և ճշգրիտ։
● Շարժիչը ավտոմատ կերպով թույլ է տալիս լարվածության վերահսկման միջակայքը, մնացորդային ոլորող մոմենտ չկա, լարվածության վերահսկման ճշգրտությունը
●հանգուցալուծման շարժիչը կարող է լինել դրական և բացասական պտույտ, կարող եք առաջ գլորվել, երբ առաջ, բայց նաև հակառակ ոլորուն

Կարգավորող գլանափաթեթ և ուղեցույց
Կառուցվածք
●Կարգավորվող կառուցվածքը ձեռքով է
●Կարգավորեք գլանակը մի ծայրում և կարգավորեք մյուս ծայրը
●Կարգավորվող ակ, ուղեցույց ակ են ներմուծված առանցքակալներ
Տեխնիկական պայմաններ
●Կարգավորիչ գլանափաթեթի տրամագիծը φ100 մմ
●Կարգավորիչ գլանափաթեթի երկարությունը 1300 մմ Կարգավորելի միջակայք ± 20 մմ
●Ուղեցույց գլանափաթեթի տրամագիծը φ100 մմ
●Ուղեցույց գլանակի երկարությունը 1300 մմ
Հատկություններ
●Կարգավորեք գլանափաթեթի մեխանիզմը, որպեսզի հարմարվի ֆիլմի տարբեր որակին
●գլանի դինամիկ հավասարակշռություն, սարքը առանց թրթռման աղբյուրի դարձնելով, սահուն աշխատանք
● Ներմուծված բարձր ճշգրտության առանցքակալների օգտագործումը գլանին սահուն է դարձնում բարձր արագությամբ պտտման մեջ, նվազեցնում մեքենայի աղմուկը
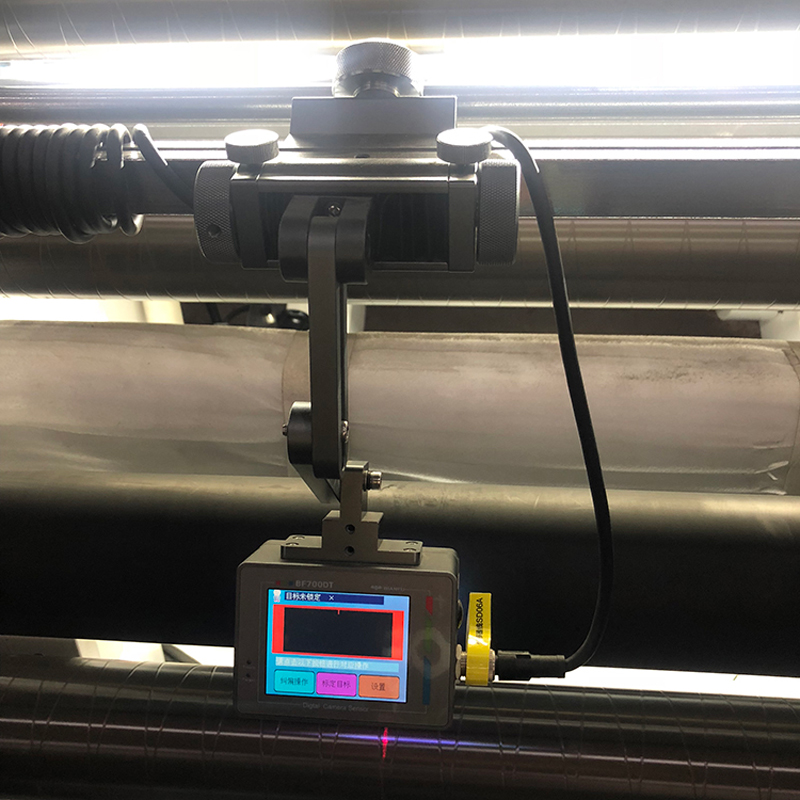
Տպագրության ստուգում
●Տեղադրեք հիշողության դադարեցման սարքը և գտեք թերի արտադրանքը:Թերի արտադրանքը կարող է ավտոմատ կերպով հետ քաշվել դիտարկման էկրան:
●Դիտորդական էկրանը կաթնային սպիտակ պլեքսիգլասից լույսով էկրան է
աղբյուրը


Փաթաթվող գլան
Կառուցվածք
●ճոճանակ ձեռքի շրջանակ
●Կլանիչը ձեռքով է
Տեխնիկական պայմաններ
●Գլանափաթեթի տրամագիծը φ80մմ
●Գլանակի երկարությունը 1230 մմ է
Ընդունման բաժին
Կառուցվածք
●ընդունիչ դարակի առանց լիսեռի օդաճնշական կոնի վերին մասը, ընդունող դարակը կարող է լինել հիդրավլիկ վերելակ և կարող է լինել լայն և նեղ
●Լարվածության ավտոմատ կառավարում
●Շարժիչ՝ պտտվելու նախաձեռնությամբ, լուծարման ֆունկցիայով
Տեխնիկական պայմաններ
●Գլանափաթեթի լայնությունը 400 ~ 1250 մմ
●Փաթաթման տրամագիծը (Max) φ800 մմ
●Փաթաթող շարժիչի հզորությունը 4կվտ
Հատկություններ
●Ոչ առանցքի օդաճնշական կոն վերին տիպի պտտվող դարակ և հիդրավլիկ վերելակ, արագ և հարմար գլորում վերև վար:
●Լարվածություն Վեկտորային լարվածությունը ավտոմատ կերպով հաշվարկվում է PLC-ի կողմից՝ ավտոմատ լարվածության վերահսկման հասնելու համար՝ ֆիլմի լարվածության կառավարումը դարձնելով ավելի գիտական և ճշգրիտ։
● Շարժիչը ավտոմատ կերպով պտտվում է այնպես, որ լարվածության հսկողության տիրույթը մեծ է, մնացորդային ոլորող մոմենտ չկա, և լարվածության կառավարման ճշգրտությունը բարձր է
●ոլորուն շարժիչը կարող է լինել դրական և բացասական պտույտ, կարող եք ետ պտտվել, երբ առաջ շարժվում է, բայց նաև երբ ծավալը հետ է պտտվում

Փաթաթվող մաս
●Բարձր ամրության ցածր լարվածության խառնուրդ չուգուն պատի վահանակներ
●պատի վահանակներ երկրորդ սթրեսը վերացնելու համար, լավ կայունություն

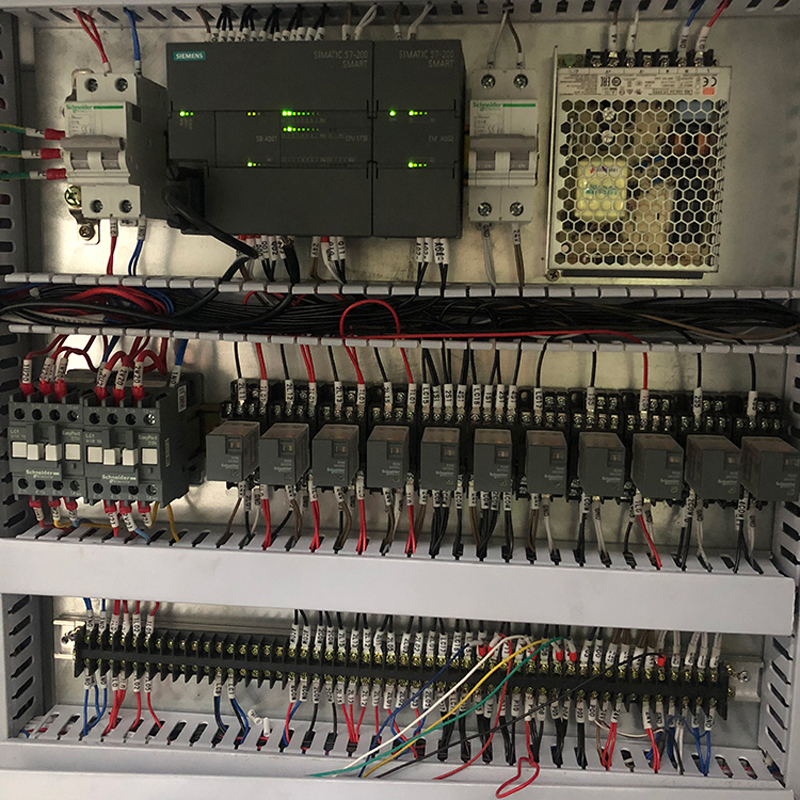
Օդաճնշական հիդրավլիկ համակարգ
●Մեքենան ավելի շատ օգտագործում է օդաճնշական և հիդրավլիկ շարժիչներ, վահանակի կենտրոնացված աշխատանքից, էլեկտրամագնիսական փականի ներդրման միջոցով, ավտոմատացման ավելի բարձր աստիճանի, նվազեցնելու աշխատուժի ինտենսիվությունը Էլեկտրական կառավարման համակարգ
●օգտագործելով մարդ-մեքենա ինտերֆեյս, PLC կենտրոնացված հսկողություն, առաջադեմ տեխնոլոգիա
●մարդ-մեքենա ինտերֆեյս, ցուցադրել և սահմանել հոսանքի արագությունը, ոլորման երկարությունը, դրել, ոլորման լարվածության սահմանում, կոնի կարգավորումներ
Մեքենայի փաթեթավորում և առաքում




